Koło Naukowe Automatyki i Robotyki
Koło Naukowe Automatyki i Robotyki (KNAiR) zostało utworzone w grudniu 2012 roku z inicjatywy studentów Wydziału Elektrycznego PB. Od początku działalności związane było z Katedrą Automatyki i Elektroniki, a obecnie Katedrą Automatyki i Robotyki. Cele pracy koła:
- Rozwijanie i pogłębianie wiedzy z takich dziedzin jak automatyka, technika mikroprocesorowa, elektronika oraz robotyka.
- Opracowywanie konstrukcji i tworzenie własnych urządzeń cyfrowych na bazie mikrokontrolerów.
- Konstruowanie robotów mobilnych i czynne uczestnictwo w zawodach robotycznych.
- Redagowanie publikacji naukowych.
- Organizowanie warsztatów z zakresu programowania mikrokontrolerów oraz montażu podzespołów elektronicznych.
- Nawiązywanie współpracy z firmami z branży szeroko pojętej automatyki i elektroniki.
Tematyka realizowanych prac
Prace Członków Koła koncentrują się na zagadnieniach z zakresu szeroko pojętej automatyki, robotyki, elektroniki oraz zastosowaniach techniki mikroprocesorowej w tych dziedzinach. Dotychczas zrealizowano szereg prac/projektów, które były zawsze autorskimi pomysłami członków koła. Członkowie Koła w ramach „grup kreatywnych” współpracowali w projektach koncepcyjnych z takimi firmami jak APS S.A, PROMOTECH.

Aktywność w KNAiR wpływająca pozytywnie na budowanie wizerunku Politechniki Białostockiej w kraju i za granicą była doceniania przez Rektora PB w formie przyznania studentom wyróżnienia – Supersudent PB.

Wiele konstrukcji wykonanych przez ambitnych konstruktorów wzięło udział w krajowych (Sumo Challenge – Łódź, LegRobot – Legionowo/Warszawa, Bałtyckie Bitwy Robotów – Grdańsk, TTR – Gdańsk, Robo XY – Gdańsk, Festiwal Robotyki Cyberbot – Poznań, Eastrobo – Białystok, Opolski Festiwal Robotów – Opole, Robocomp – Kraków, Robo Contess – Gdańsk, Robotic Tournament – Rybnik, Robomaticon – Warszawa, Robotic Arena – Wrocław) i międzynarodowych zawodach robotycznych (RobotChallenge – Wiedeń, International Robot Sumo Tournament – Tokio, Robots’ Intellect – Kowno, Robogames – Pleasanton, USA) zajmując podczas wymagającej rywalizacji czołowe lokaty w takich konkurencjach jak Sumo, Line Follower, Muscle Wire Crawler czy Micromouse.

Kontakt
Przewodniczący koła: Daniel Marczak, elektrotechnika dualna.
Opiekun: dr inż. Rafał Kociszewski, r.kociszewski [at] pb.edu.pl.
Miejsce spotkań: sala WE-229.
Zrealizowane projekty
 Robot mobilny turniejowej klasy Sumo – zawody robotów w kategorii sumo są wzorowane na japońskich zapasach – sumo. Przeciwnikami są tutaj dwa autonomiczne roboty, które próbują wypchnąć rywala poza powierzchnię ringu.
Robot mobilny turniejowej klasy Sumo – zawody robotów w kategorii sumo są wzorowane na japońskich zapasach – sumo. Przeciwnikami są tutaj dwa autonomiczne roboty, które próbują wypchnąć rywala poza powierzchnię ringu.
 Robot mobilny turniejowej klasy Line Follower wyposażony w turbinę – są to roboty startujące w zawodach, których zadaniem jest przejechanie wyznaczonej trasy w jak najkrótszym czasie, roboty ścigają się na białym podłożu z wyznaczoną czarną trasą.
Robot mobilny turniejowej klasy Line Follower wyposażony w turbinę – są to roboty startujące w zawodach, których zadaniem jest przejechanie wyznaczonej trasy w jak najkrótszym czasie, roboty ścigają się na białym podłożu z wyznaczoną czarną trasą.
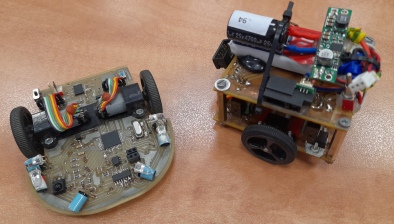 Roboty mobilne turniejowej klasy Micromouse – są to roboty, które podczas zawodów pokonują labirynt – odnajdują jak najszybciej, najkrótszą drogę do wyjścia z labiryntu.
Roboty mobilne turniejowej klasy Micromouse – są to roboty, które podczas zawodów pokonują labirynt – odnajdują jak najszybciej, najkrótszą drogę do wyjścia z labiryntu.
 System lokalizacji osób w budynkach – precyzyjny system potrafiący ustalić pozycję osoby znajdującej się w budynku z dokładnością do 30 cm.
System lokalizacji osób w budynkach – precyzyjny system potrafiący ustalić pozycję osoby znajdującej się w budynku z dokładnością do 30 cm.
 Pojazd transportowy do podzespołów produkcyjnych – platforma mobilna o nośności do 100 kg, mogąca poruszać się w sposób autonomiczny w zakładzie pracy na hali produkcyjnej.
Pojazd transportowy do podzespołów produkcyjnych – platforma mobilna o nośności do 100 kg, mogąca poruszać się w sposób autonomiczny w zakładzie pracy na hali produkcyjnej.
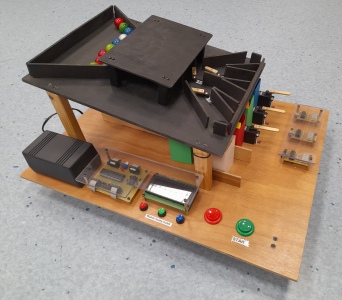 System segregacji kolorowych komponentów – system do rozpoznawania barwy (RGB) elementów i kierowaniu ich po detekcji do odpowiednich pojemników.
System segregacji kolorowych komponentów – system do rozpoznawania barwy (RGB) elementów i kierowaniu ich po detekcji do odpowiednich pojemników.
 Manipulator (5 stopni swobody) – manipulator wykonany za pomocą serwomechanizmów modelarskich z możliwością swobodnego programowania z poziomu mikrokontrolera sterującego, dodatkowo sterowany za pomocą pada do PS2.
Manipulator (5 stopni swobody) – manipulator wykonany za pomocą serwomechanizmów modelarskich z możliwością swobodnego programowania z poziomu mikrokontrolera sterującego, dodatkowo sterowany za pomocą pada do PS2.
 Projekt w trakcie realizacji – manipulator równoległy typu Delta (roboty tego typu są zaprojektowane specjalnie z myślą o zmaksymalizowaniu prędkości i wszechstronności w procesach obsługi i pobierania małych elementów w różnych gałęziach przemysłu).
Projekt w trakcie realizacji – manipulator równoległy typu Delta (roboty tego typu są zaprojektowane specjalnie z myślą o zmaksymalizowaniu prędkości i wszechstronności w procesach obsługi i pobierania małych elementów w różnych gałęziach przemysłu).
Oprócz prac wymienionych wyżej studenci mogą od podstaw nauczyć się sposobem sterowania robotów w oparciu o platformy amatorskie lub profesjonalne/komercyjne.
Projekty proponowane do realizacji
Manipulator typu Platforma Stewarta – Platforma Stewarta-Gougha została wynaleziona w 1965 roku. Oryginalna wersja platformy opierała się na siłownikach hydraulicznych. Obecnie coraz częściej są one zastępowane serwomechanizmami. Z powodzeniem znajduje ona zastosowanie w różnego rodzaju symulatorach pojazdów lub samolotów. Celem projektu jest wykonanie modelu platformy wraz z układem sterowania.
Automat do odtwarzania płyt CD – celem projektu jest wykonanie automatu, opartego o manipulator, który będzie działał na zasadzie automatu do odtwarzania płyt z muzyką.
Robot piszący – celem projektu jest wykonanie autonomicznej platformy mobilnej sterowanej bezprzewodowo, mogącej kreślić różne figury geometryczne lub pisać proste teksty za pomocą sterowanego automatycznie flamastra.
Propozycja podczas spotkań koła – nauka tworzenia schematów ideowych oraz płytek PCB w jednym z programów CAD. Tworzenie plików produkcyjnych i wykonanie przykładowych płytek PCB metodą termotransferu.