Seminarium „Advanced trajectory planning for collaborative robots”
10-11-2022Serdecznie zapraszamy na seminarium „Advanced trajectory planning for collaborative robots”, które odbędzie się 17 listopada 2022 r. o godz. 12:00 w sali Rady Wydziału WE-007.
Podczas seminarium prof. Alessandro Gasparetto i dr Lorenzo Scalera z Uniwersytetu w Udine przedstawią wyniki swoich prac dotyczących planowania trajektorii ruchu robotów współpracujących.
Naukowcy z Włoch przebywają na Politechnice Białostockiej w ramach programu Erasmus+ na zaproszenie dr. hab. inż. Arkadiusza Mystkowskiego, prof. PB.


Streszczenie
Trajectory planning is a crucial and challenging problem for research on intelligent robotic and mechatronic systems. Indeed, in every robotic application, it is required to define not only a path, but also a motion law that can guarantee a feasible and safe operation of the system according to the requirements of the task and the limits of the robot. Many approaches to the problem of trajectory planning have been developed and investigated in the literature. However, emerging scenarios of industrial robotics, such as collaborative robotics and human–robot interaction, demand novel and advanced strategies for the planning of robot trajectories to ensure smoothness, safety, and fluency during the execution of a task for a robot working alongside a human operator.
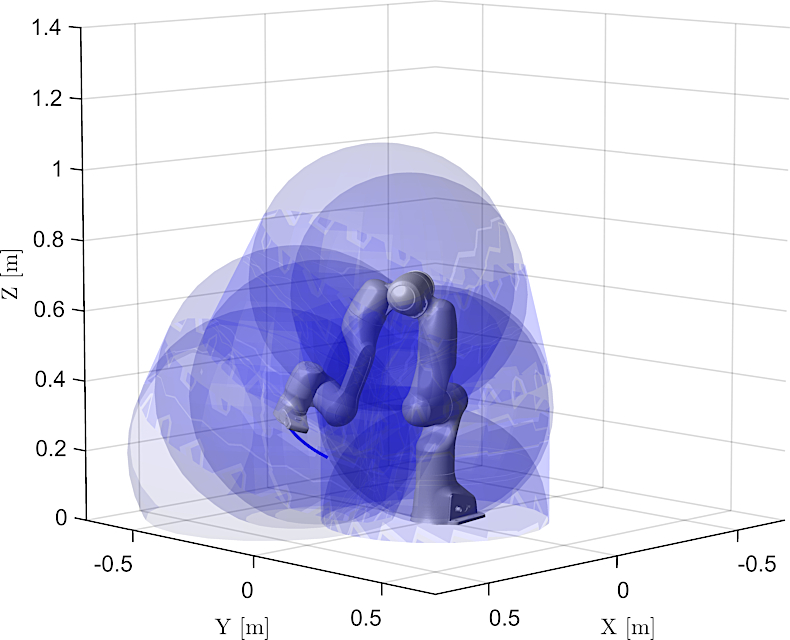
In this seminar, we will present an approach to enhance fluency and productivity in human-robot collaboration through online scaling of dynamic safety zones. A supervisory controller runs online safety checks between bounding volumes enclosing robot and human to identify possible collision dangers. To optimize the sizes of safety zones enclosing the manipulator, the method minimizes the time of potential stop trajectories considering the robot dynamics and its torque constraints and leverages the directed speed of the robot parts with respect to the human. Simulations and experimental tests on a robotic arm with seven degrees of freedom verify the effectiveness of the proposed approach, and collaborative fluency metrics show the benefits of the method with respect to existing approaches.